
專屬客服號

微信訂閱號
全面提升數據價值
賦能業務提質增效
摘要:目前,汽車智能化、電子化以及網聯化發展趨勢明顯,無人駕駛是未來汽車發展的重要方向。諸如BBA、特斯拉、谷歌、百度、蘋果等公司,無論是傳統車企、新造車勢力還是互聯網大佬,都在加大在無人駕駛領域的投入。大部分車企都預計能在2020年前完全實現L3級別的半自動駕駛技術,到2025年實現L5級別的全自動駕駛技術。那么現在無人駕駛的關鍵技術究竟如何呢。
目前,無人駕駛汽車中應用的關鍵技術主要在環境感知、決策與規劃、控制與執行等三個關鍵技術環節。其中環境感知環節多借助于傳感器、精準定位、高精地圖與V2X系統來實現。

圖1 無人駕駛汽車中的三個關鍵技術環節
環境感知采用多感融合技術
環境感知傳感技術可以理解成汽車利用多種傳感器對車身周圍的動態和靜態對象進行3D重構。目前,環境感知技術有兩種技術路線,一種是以特斯拉為代表的以攝像機為主導的多傳感器融合方案;另一種是以谷歌、百度為代表的以激光雷達為主導,其他傳感器為輔助的技術方案。
攝像頭方案技術比較成熟、成本低,但獲取外界三維信息較難,一般多采用多目攝像頭;另一個缺點是攝像頭受環境光影響比較大,易產生盲區。激光雷達的優點在于,其探測距離較遠,而且能夠準確獲取物體的三維信息;另外它的穩定性相當高,魯棒性好。但缺點是激光雷達成本過高、不易量產,如谷歌Waymo無人車裝載6-8個16線旋轉機械式激光雷達,單價在7500美元左右,最新的16線相控陣固態激光雷達被認為是替代機械式激光雷達的關鍵技術;另外激光雷達波長短,易受天氣影響,在多霧、多雨的情況下,精確度大大降低。精確定位技術是讓汽車感知自己所在的物理位置,這就涉及慣性導航系統(IMU)、輪速編碼器與航跡推算、衛星導航系統(GPS、Glonass、北斗等)以及SLAM自主導航系統,現在的無人車多采用慣導+GPS的組合方式。同時為了更好的規避潛在風險,幫助車輛預知路面復雜信息,如坡度、曲率、航向等,無人駕駛往往需要結合實時的高精地圖,而這種實時性在4G時代傳輸速率并不能達到,在5G時代就可以通過車聯網(V2X系統)來實現。
目前谷歌的無人車Waymo采用的是5個激光雷達+4個毫米波雷達+360度全景攝像頭+GPS、IMU導航,百度無人車采用的是頂部64線激光雷達+3個環繞16線激光雷達方案,而特斯拉似乎對激光雷達深惡痛絕,因此一直使用的是8個攝像頭+1個毫米波雷達+12個超聲波雷達的方案。
自主決策與規劃是核心技術
自動駕駛汽車的行為決策與路徑規劃是指依據環境感知和導航子系統素材信息,根據給定的起始點和和終點,通過一些特定的算法(卷積神經網絡、深度學習)及約束規則如無碰撞、安全到達終點等,規劃處兩點間多雨可選安全路徑,并在這些路徑中選取一條最優的路徑作為車輛行駛軌跡。
決策系統分為兩種:基于規則和基于深度學習的決策技術。基于專家規則的行為決策系統算法邏輯清晰、穩定性強、便于建模,但對復雜工況處理及算法性能的提升存在瓶頸。基于學習算法的行為決策系統具備自學性能、便于系統優化及模型訓練提升,但模型修正難度大、學習效果依賴數據樣本、網絡結構不合理可能導致過學習或欠學習等。
目前,市場上無人車決策系統更多的采用規則算法與學習算法結合的方式,頂層采用規則算法,根據場景進行層級遍歷;底層采用深度學習算法,基于具體場景分模塊應用,發揮學習算法的優勢。

圖2 決策與規劃環節的架構
自動控制與執行技術
車輛控制平臺是無人車的核心部件,控制著車輛的各種控制系統。其主要包括電子控制單元(ECU)和通信總線兩部分。ECU又稱行車電腦,主要用來控制算法,百度無人車的“百度大腦”即是ECU組件;通信總線主要用來實現ECU與控制部件間的通信功能。
車輛控制系統可以分為縱向控制和橫向控制兩個環節。縱向控制主要通過油門和制動綜合控制的方法來實現對預定車速的追蹤,各種電機、發動機、傳動模型、汽車運行模型和剎車過程模型與不同的控制算法相結合,構成了各種各樣的縱向控制模式。橫向控制主要是電子助力轉向來完成,而其算法有兩種不同的方法來實現,一種是基于駕駛員模擬的方法,通過簡單的動力學模型、駕駛員操作規則或者駕駛員操作過程數據來設計控制器;另一種是基于車輛動力學模型的方法,建立精確的汽車橫向運動模型如單軌模型等。
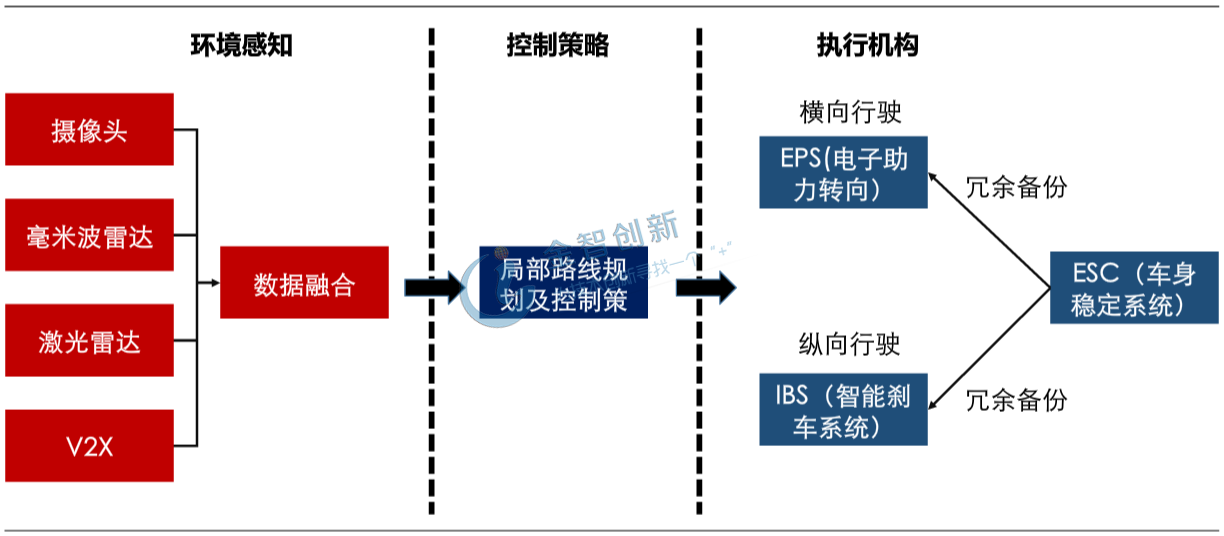
圖3 控制與執行系統的架構
結語
無人駕駛想要實現,主要依靠眼睛+大腦的組合。眼睛主要是各類傳感器,而大腦主要是AI芯片和算法,因此無人駕駛和人工智能一樣,也受益于大數據、云計算和優秀算法。隨著人工智能技術發展的越來越快,傳感器技術、大數據、云計算及深度學習也將實現技術突破,相信無人駕駛技術也會迎來質的飛躍。
本文為我公司原創,歡迎轉載,轉載請標明出處,違者必究!

客戶服務熱線:
周一至周五(09:00 - 18:00)

專屬客服號

微信訂閱號
Copyright ? 北京篤威爾數字技術有限公司 | 五度易鏈 京ICP備2021019355號-2 京公網安備11010602103306
公司地址:北京市豐臺區廣安路9號國投財富廣場1號樓12層 聯系電話:010-68321050
Copyright ? 北京篤威爾數字技術有限公司 | 五度易鏈 京ICP備2021019355號-2 京公網安備11010602103306
公司地址:北京市豐臺區廣安路9號國投財富廣場1號樓12層 聯系電話:010-68321050
請完善以下信息,我們的顧問會在1個工作日內與您聯系,為您安排產品定制服務




評論